
يمكن للروبوتات قريبًا أن تُنجز مهام البحث والإنقاذ، والفحص، والصيانة المعقدة، وغيرها من العمليات الواقعية بشكل مستقل.
لتحقيق ذلك، يجب أن تكون قادرة على التنقل بسلاسة في بيئات مجهولة ومعقدة دون التعطل أو الانحصار، ما يتطلب تدخّل الإنسان.
تعتمد معظم أنظمة الملاحة الذاتية على أنظمة تحديد المواقع العالمية (GPS) لتحديد موقع الروبوت ضمن خريطة، إلا أن هذه الأنظمة قد تصبح غير فعّالة في كثير من البيئات، بما في ذلك الكهوف والمساحات غير المهيكلة والمباني المنهارة.
طور باحثون في معهد بكين للتكنولوجيا نظامًا جديدًا مستوحى من الطبيعة يمكنه تحسين ملاحة الروبوتات في البيئات المعقدة وغير المهيكلة، دون الاعتماد على GPS .
وقدّم الفريق إطار عمل موحدًا مستوحى من ثلاث استراتيجيات ملاحة بيولوجية مختلفة لدى الحشرات والطيور والقوارض.
قال شيكدر شاندان، المؤلف الأول للبحث: “أردنا دمج الاستراتيجيات الأكثر فاعلية لدى هذه الفئات الثلاث في نظام واحد للتغلب على القيود الأساسية للملاحة التقليدية، مثل هشاشة الحساسات والاستهلاك العالي للطاقة، خاصة في البيئات التي لا يتوفر فيها “GPS.

يتضمن الإطار ثلاثة مكونات رئيسية:
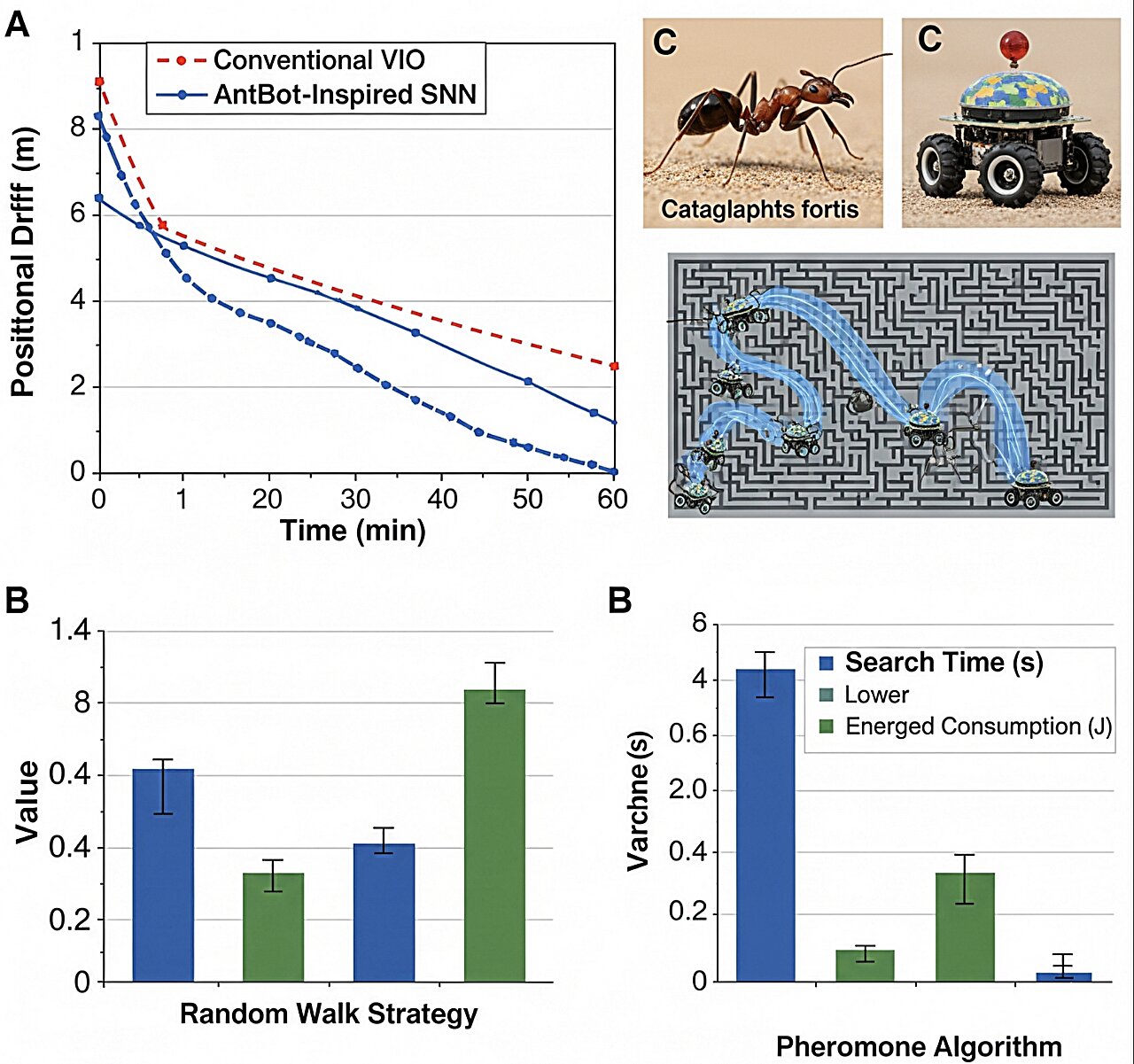
- مكامل مسار مستوحى من الحشرات: يعمل على عد خطوات داخلي باستخدام شبكة عصبية نابضة على عتاد منخفض الطاقة.
- نظام دمج متعدد الحواس مستوحى من الطيور: يجمع بيانات من المغناطيس الكمومي، والبوصلة المستقطبة، والرؤية باستخدام فلتر بايزي لتحديد الاتجاه بدقة حتى عند فشل أحد الحساسات.
- نظام رسم خرائط مستوحى من القوارض: ينشئ ذاكرة مكانية ويحدّث الخريطة عند اكتشاف معالم بارزة فقط، محاكيًا كفاءة الطاقة في الحُصين الدماغي.
اختبر الباحثون النظام ميدانيًا باستخدام 23 منصة روبوتية في بيئات حقيقية صعبة، مثل المناجم المهجورة والغابات الكثيفة.
أظهرت النتائج انخفاض الانحراف في الموقع بنسبة 41%، وزيادة الكفاءة الطاقية حتى 60%، واستعادة النظام بعد فشل الحساسات بسرعة أكبر بنسبة 83%.
يمكن تطبيق هذا النظام في المستقبل في مهام الاستجابة للكوارث، واستكشاف الكواكب، والمهام البحرية العميقة، حيث يكون الاعتماد على GPS أو الحساسات المثالية غير ممكن.
ويخطط الفريق لتطوير تعلم مستمر على الشريحة، لتقليد التكيف البيولوجي والتوسع في بيئات أكبر.


